![Forum de la team [S@W]](https://i.servimg.com/u/f44/11/64/25/70/59300711.png)



Depuis de nombreuses semaines je dessine et redessine ED 209, impossible de faire une correspondance avec tout ce que l'on trouve sur internet, aussi j'ai décidé de me lancer et de faire du mieux que je peux avec les cotes de PEPAKURA.COM, et d'autres photos qui me serviront pour les détails.
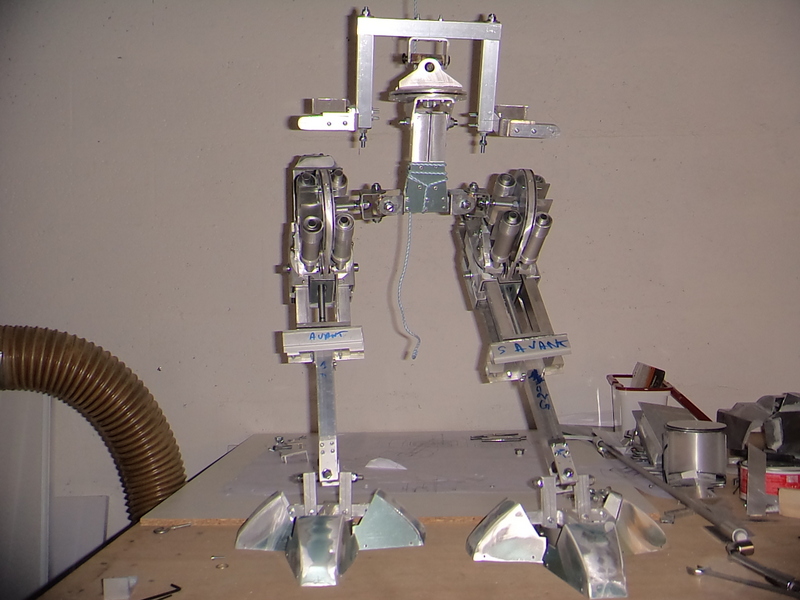
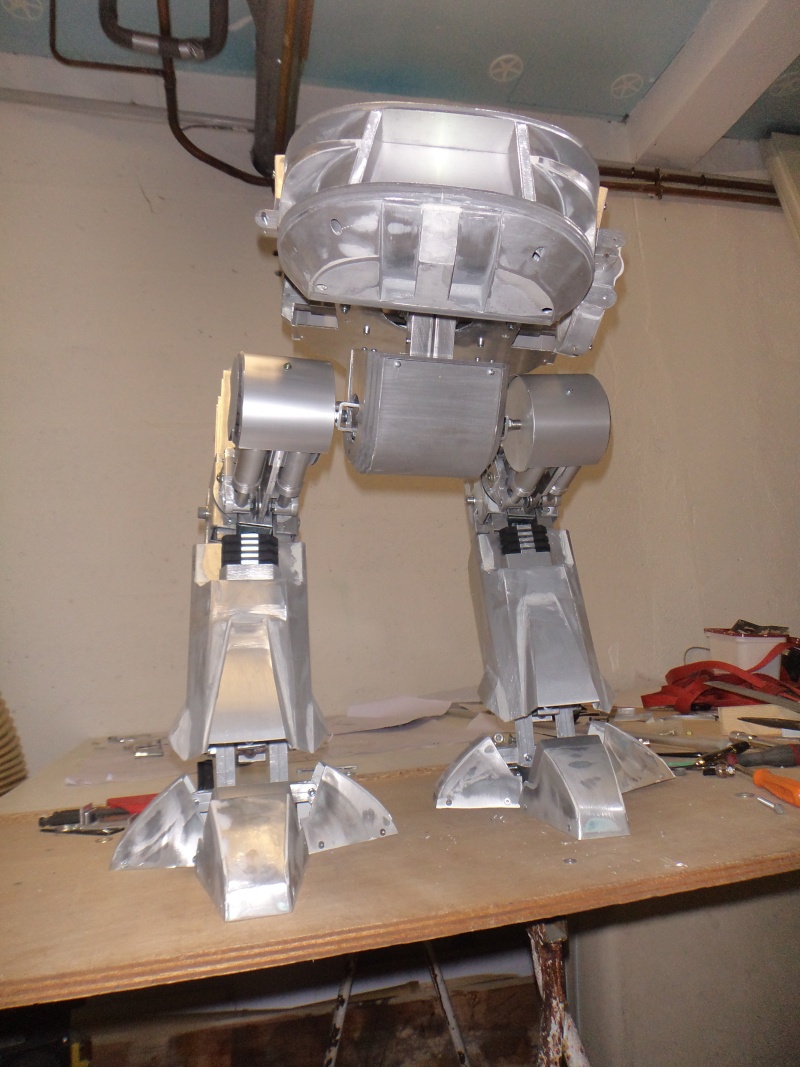
Tout d'abord il lui faut un squelette, et en plus articulé. Toutes les parties qui peuvent être articulées le seront, et si jamais cela ne tien pas elles seront condamnées par des vis.
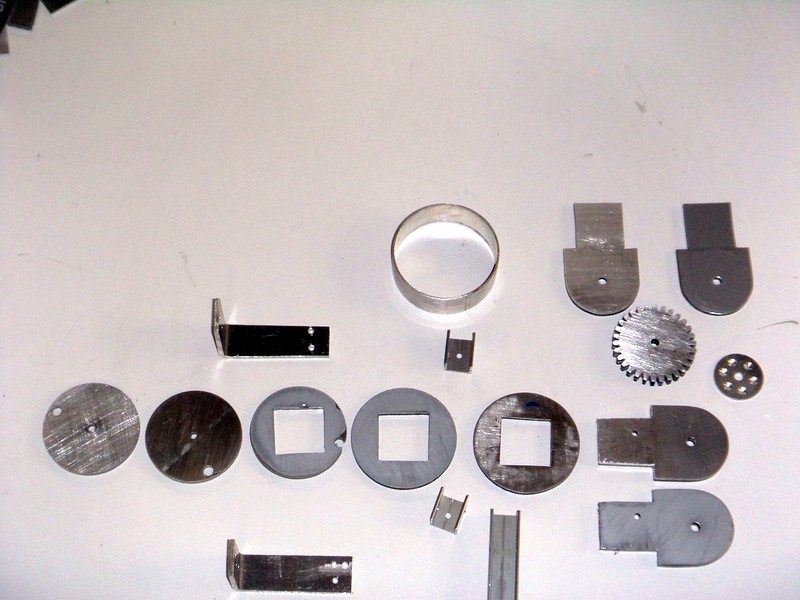
Mon plan de travail

Détail de la cuisse et genou
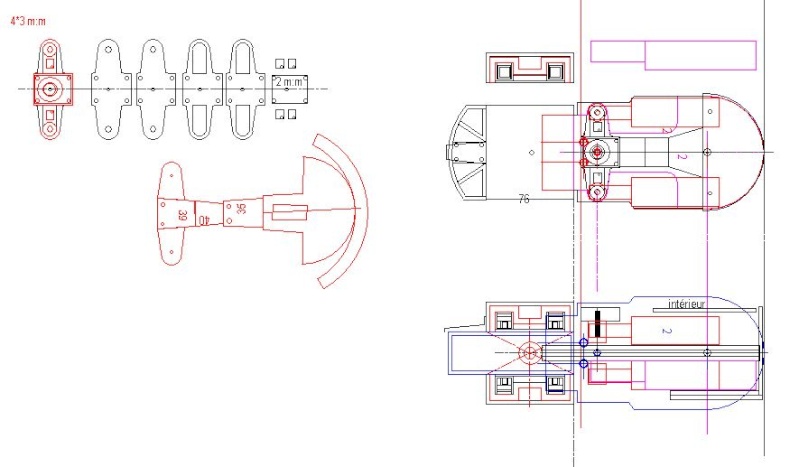
la jambe et le pied

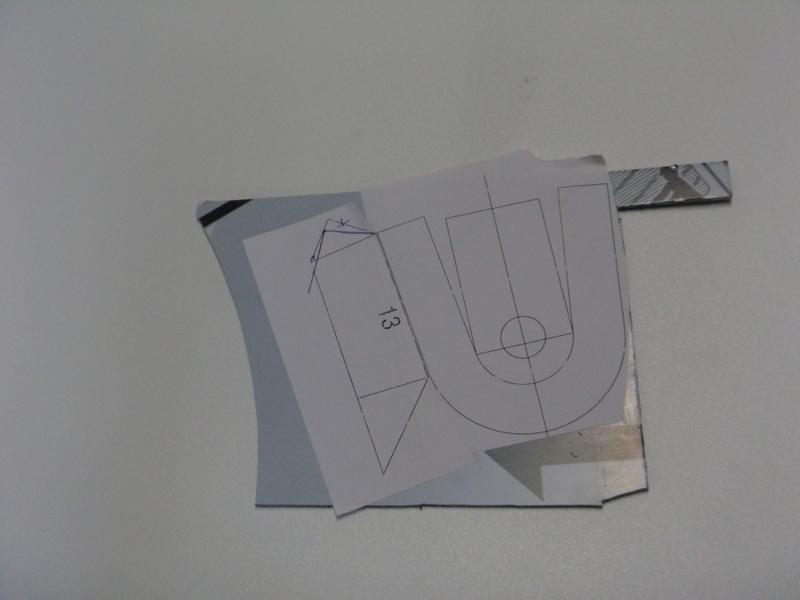
Quelque parties qui seront imprimé sur papier autocollant, qui sera lui même collé sur l'aluminium.

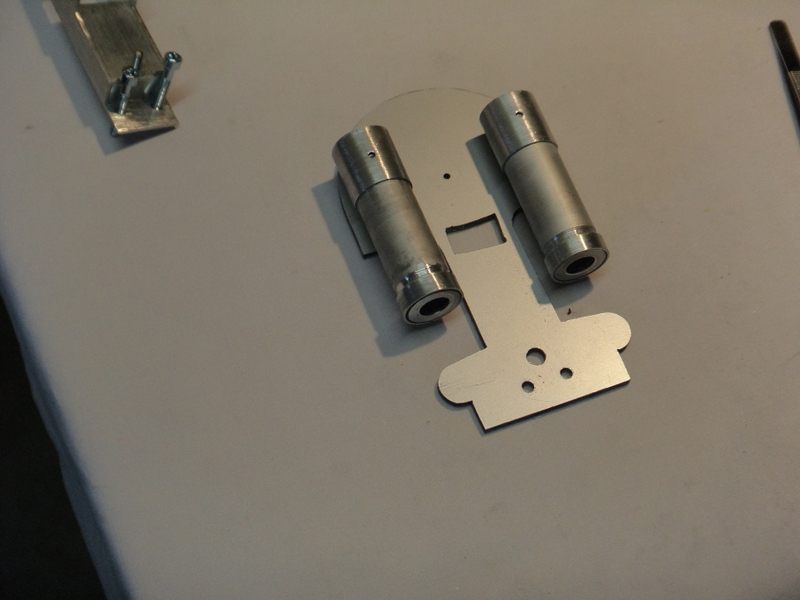
Les pattes du ROBOT ou pour ceux qui préfèrent, les pieds.
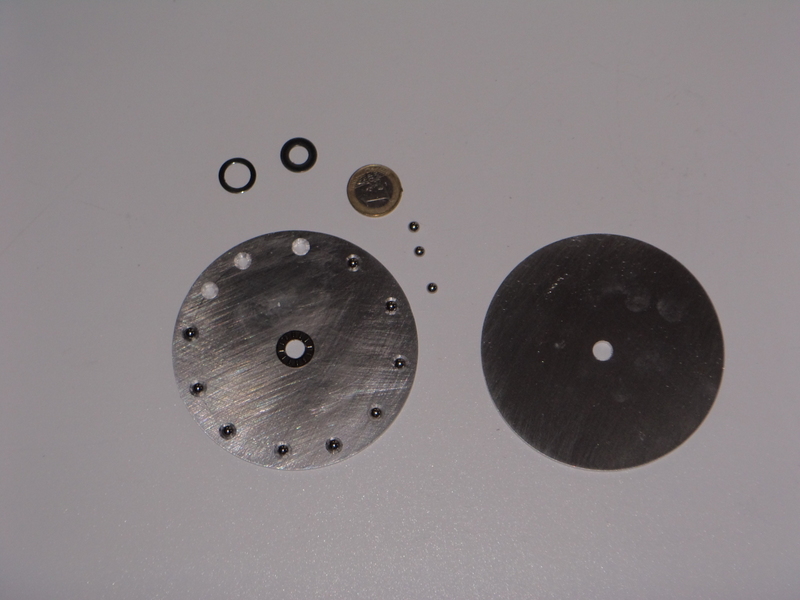
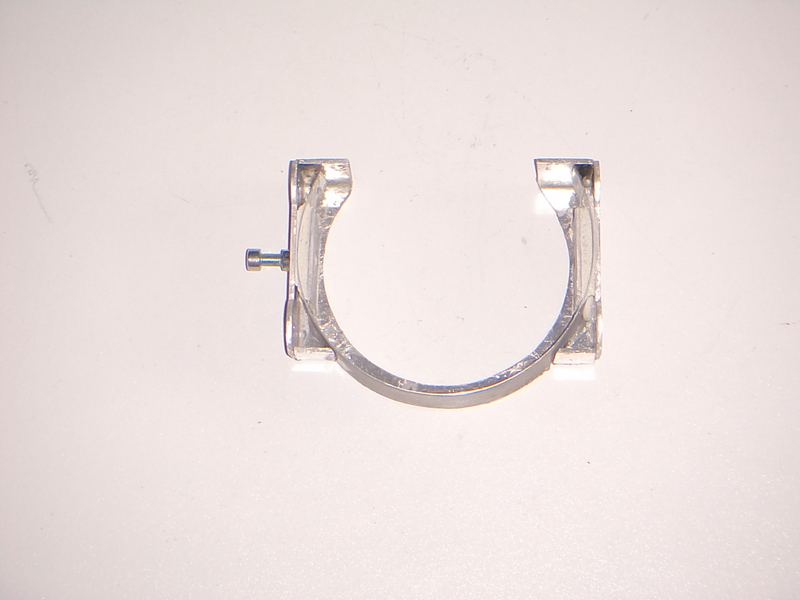
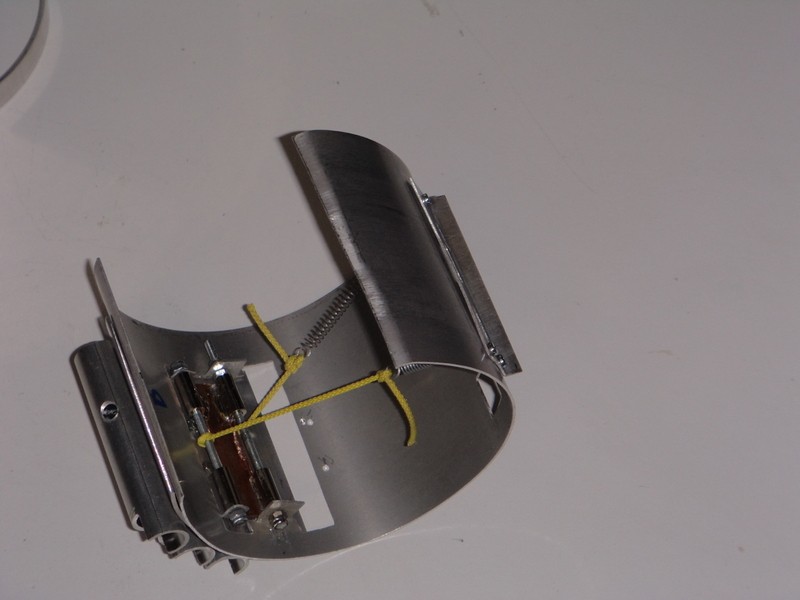
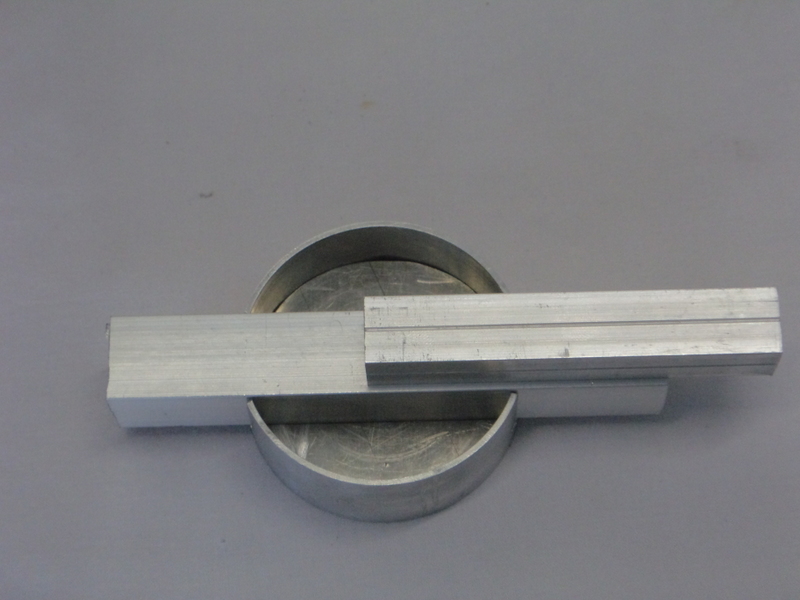
Un morceau de tube diamètre 65 m/m, une rondelle en alu (fabrication maison).

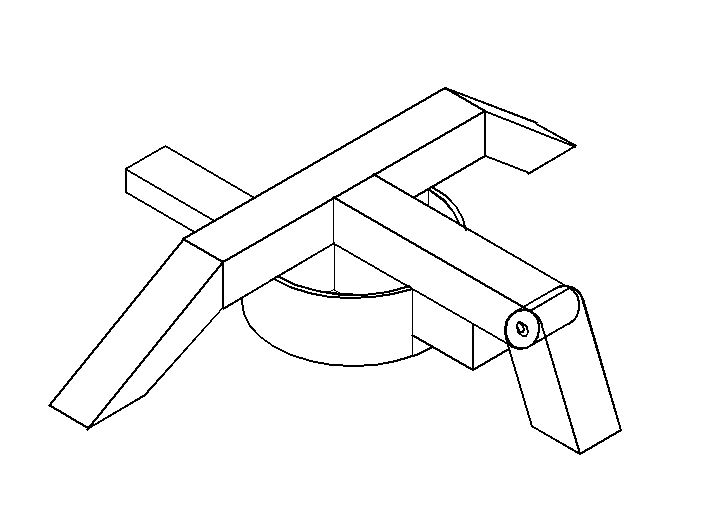
L'assemblage

Découpe pour positionnement du support de doigts

MONTAGE


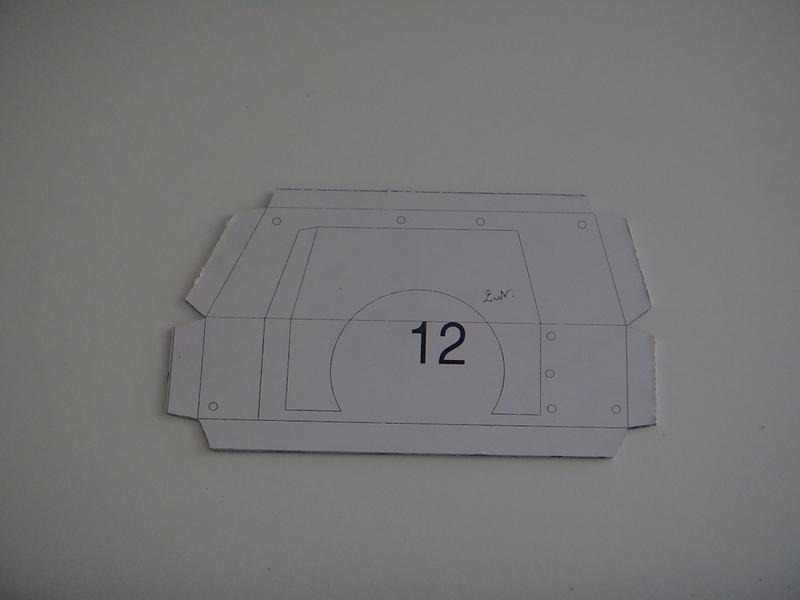
Phalange du doigt avant carré "plein" 15*15
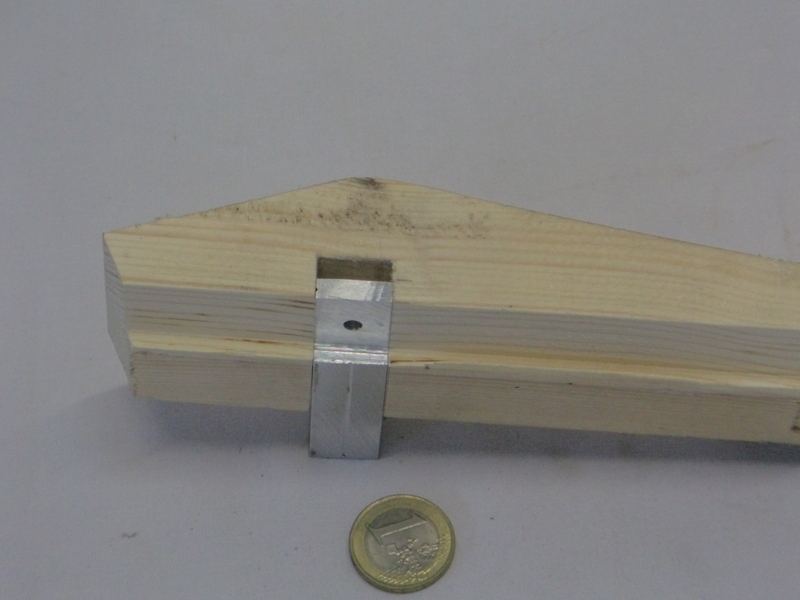
Les doigts sont articulés sur les phalanges, un support permettant de les découper tous de la même façon a été fabriqué avec un morceau de bois, ce guide préserve mes doigts, car c'est sur la scie sur table que les pièces seront travaillés, un tour coute trop cher.



Une fois l'entaille terminée.

Les doigts même topo, un autre support, il suffit de retourner la pièce pour garder la zone centrale.
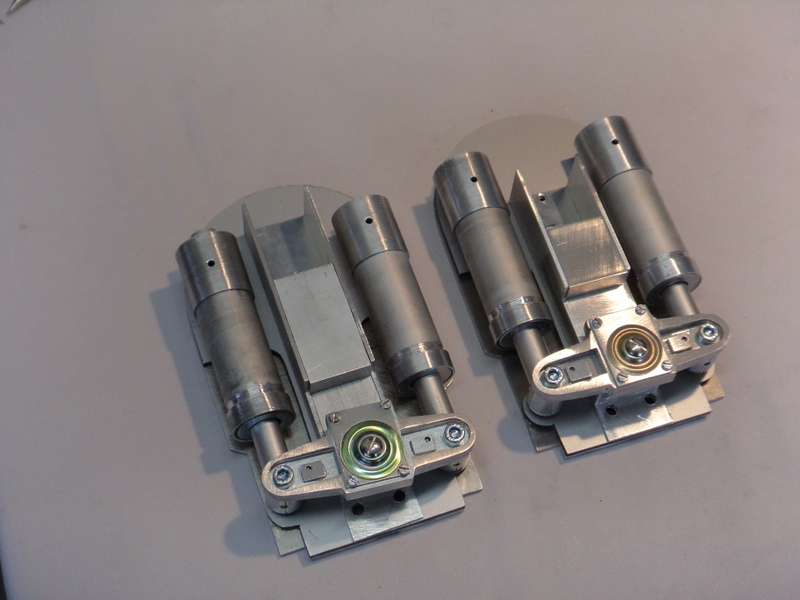
MONTAGE


Mise en place sur le "TALON"

Avec les trois doigts

Avec les montants support de l'articulation

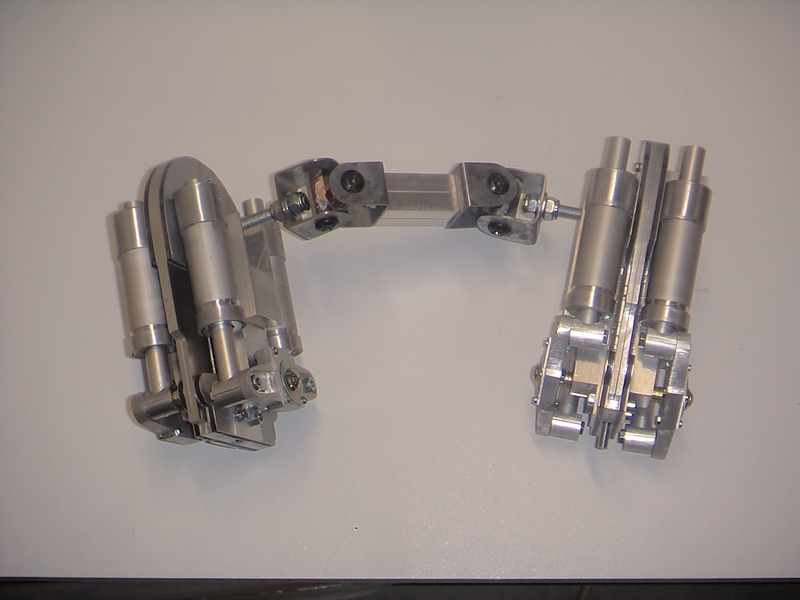
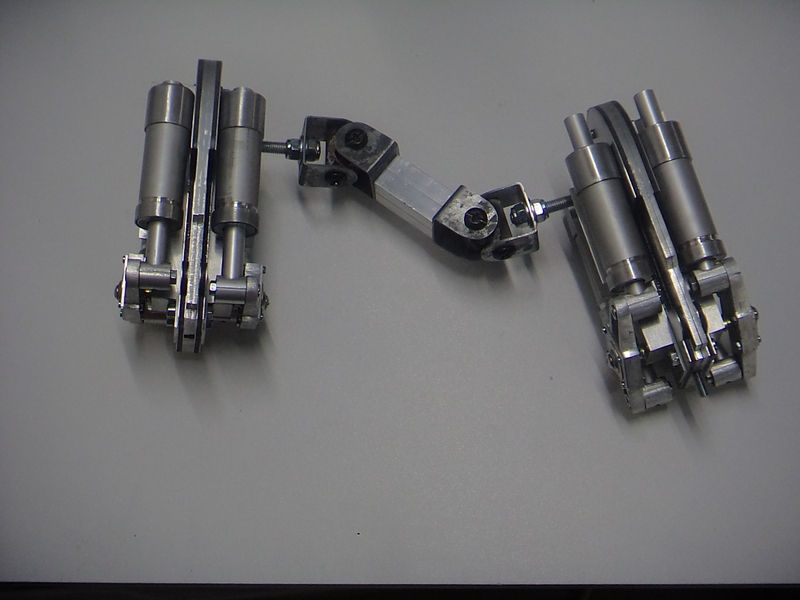
L'articulation de la cheville: celle ci doit être souple, mais doit pouvoir se raidir en fonction du mouvement et surtout du poids du robot.
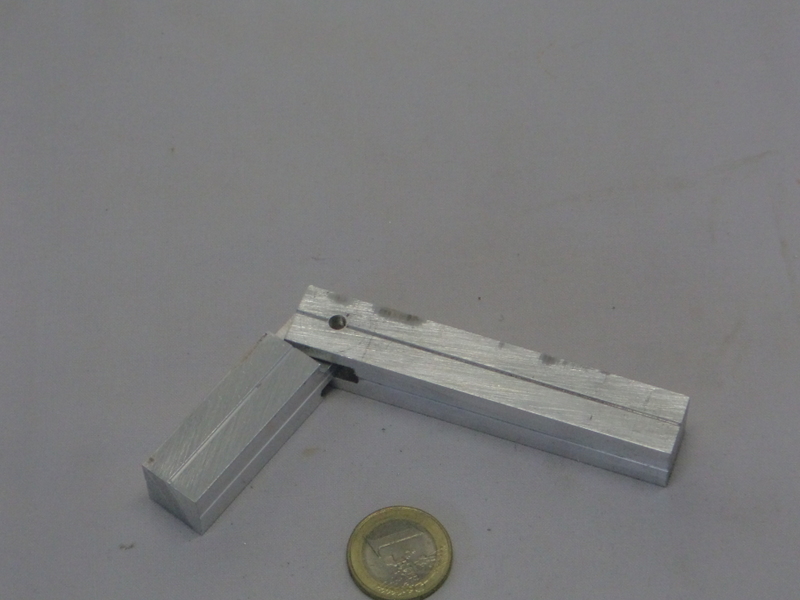
Deux tubes laiton ( récupération) diamètre 12 m/m

l'un est percé en son centre, diamètre 11 m/m , ensuite finition à la lime pour obtenir le diamètre 12, du coup on a deux morceaux identiques.
L'autre est percé dans son centre diamètre 8 m/m

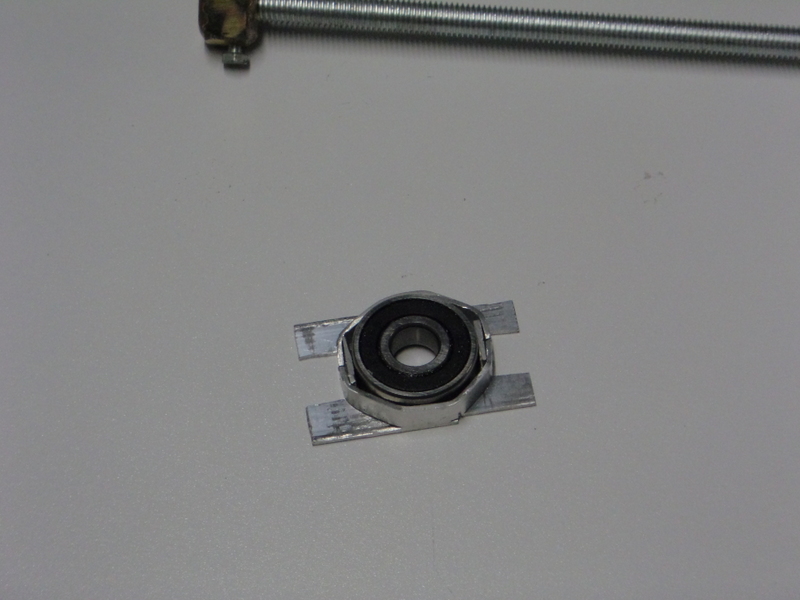
Positionnement sur l'autre tube et serrage avec un boulon diamètre 8 m/m

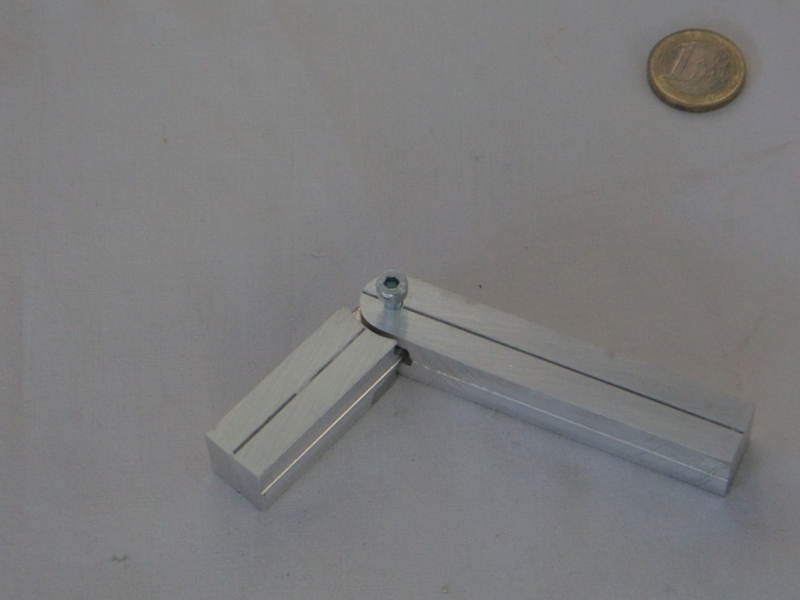
Brasage de l'ensemble, la tige fileté aussi

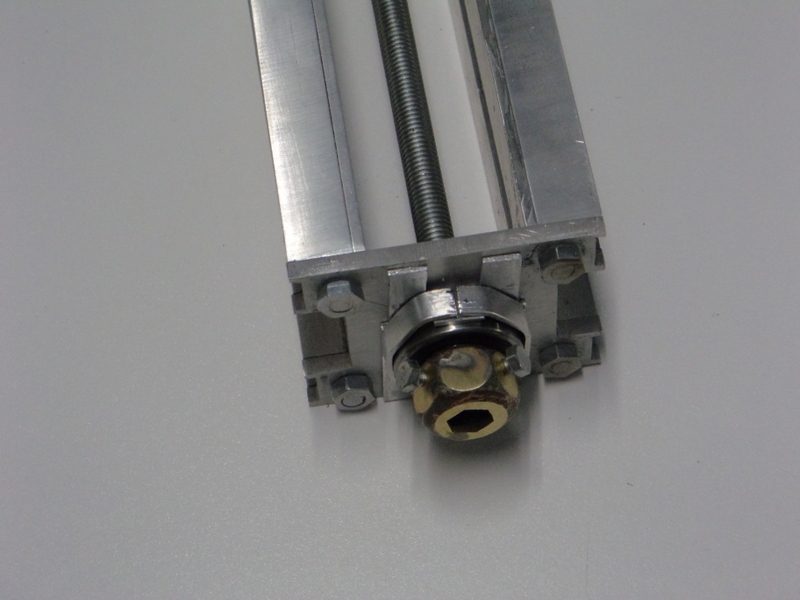
L'ensemble est brasé, il suffit de percer la partie creuse pour enlever la tige fileté qui gène.
On obtient ainsi une croix percé dans les deux sens.

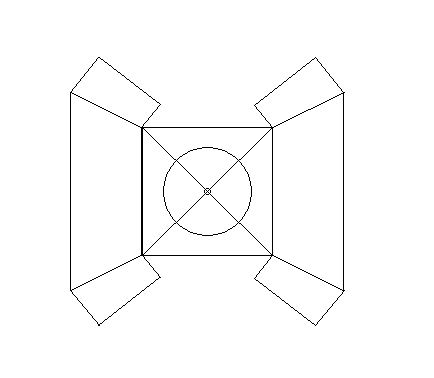
Un peut d'anatomie pour pouvoir suivre et s'y retrouver au niveau des pattes voici une planche d'anatomie avec les appellations, et les différentes articulations.

Le "TIBIA 1" tube alu équerres et autres tubes qui servent de renforts
L'ensemble monté.

Avec les doigts .............. en carton "PAPERCRAFT"


Les "DOIGTS" .......... PAPERCRAFT
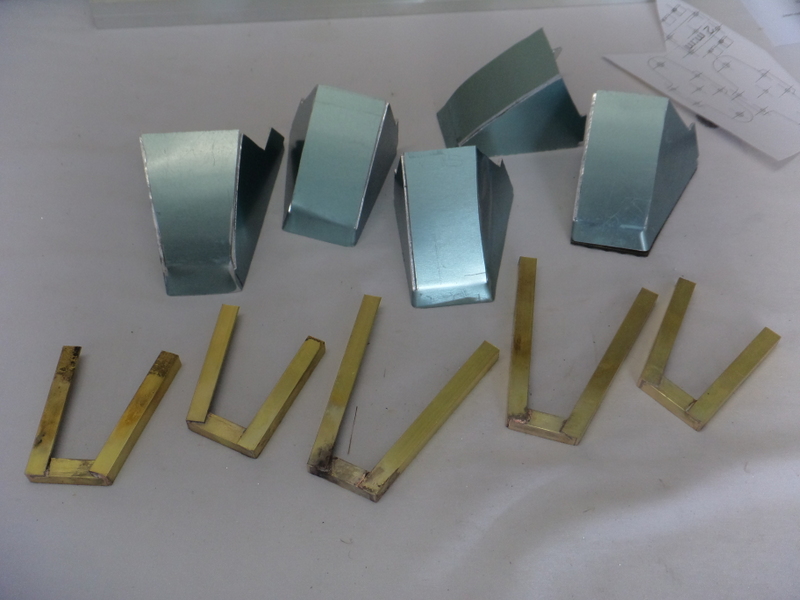
De l'alu 2 m/m découpé et plié
 .
.

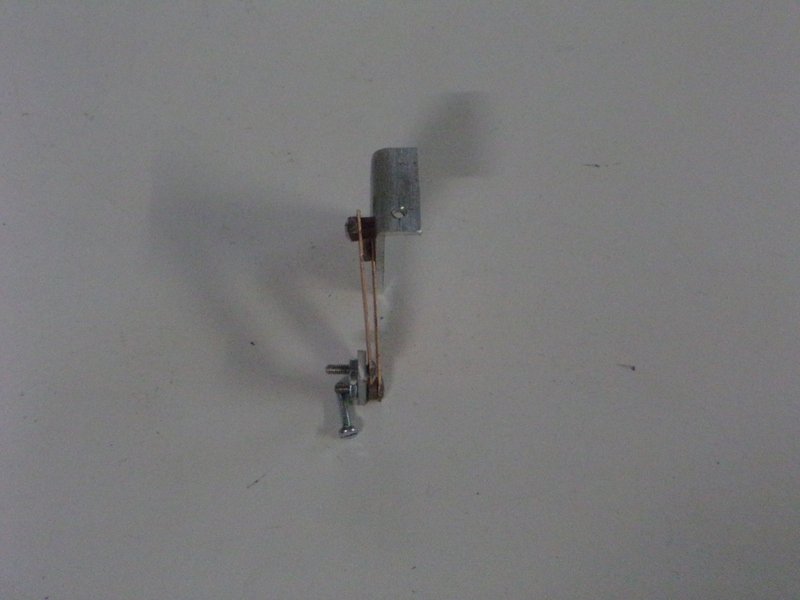
Tous les doigts sont fait sauf ceux de derrière. Une armature est nécessaire pour les tenir sur les phalanges, celle ci est réalisé avec des équerres en laiton soudées.
Cette pièce est la bande qui s'efface lorsque la jambe se plie et vient, toucher les doigts.
Les doigts sont tous montés, ceux de derrière aussi, conformément à mes prévisions, et contrairement aux autres réalisations trouvées sur le net, seules les 4 doigts reposent sur le sol, la paume ne repose pas par terre, ce qui devrait améliorer la tenue, si tous ce passe bien.

Sous les doigts un plaque d'alu servira à fixer la phalange.

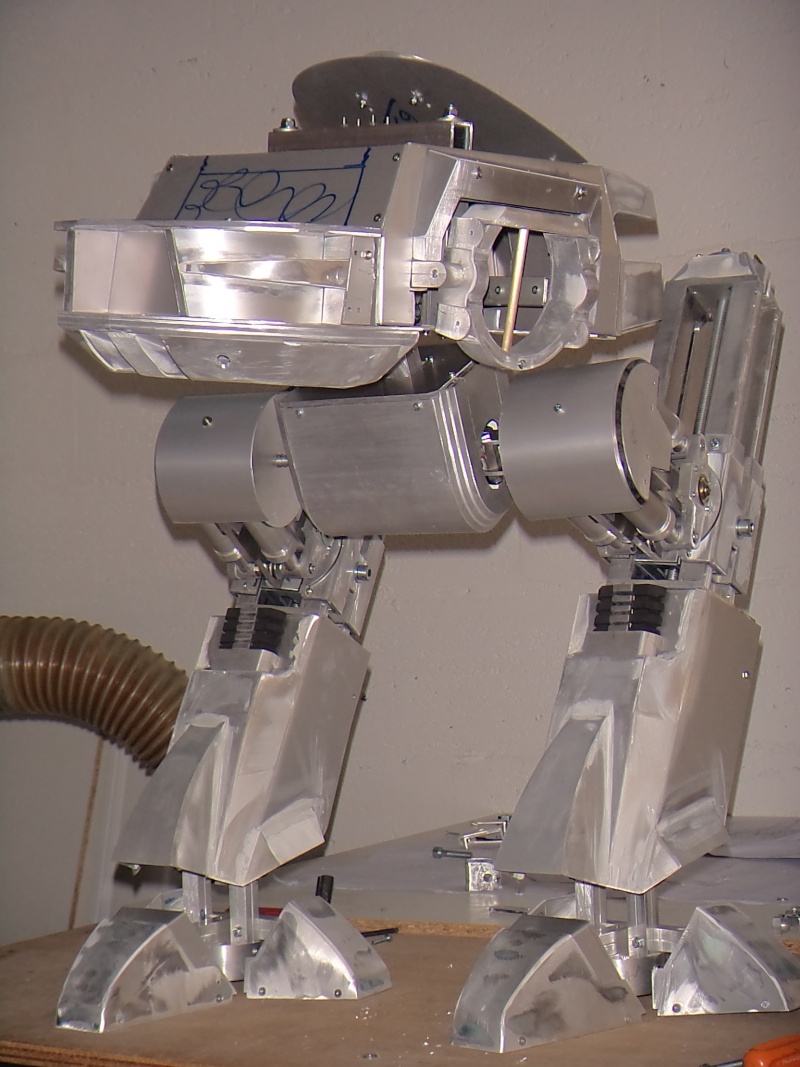
LE TIBIA ET LES GLISSIERES
Deux feuilles d'alu 2 m/m colée entre elles avec un scotch double face, il est plus rapide de travailler deux pièces en même temps. Sauf pour des épaisseurs supérieures à 3m/m
Perçage
Découpe

Un petit coup de lime

Découpe avec la scie sur table et ponçage ( pour la photo)

Puisque la perceuse et la scie sont réglés et que le montage me convient autant en profiter pour tout découper

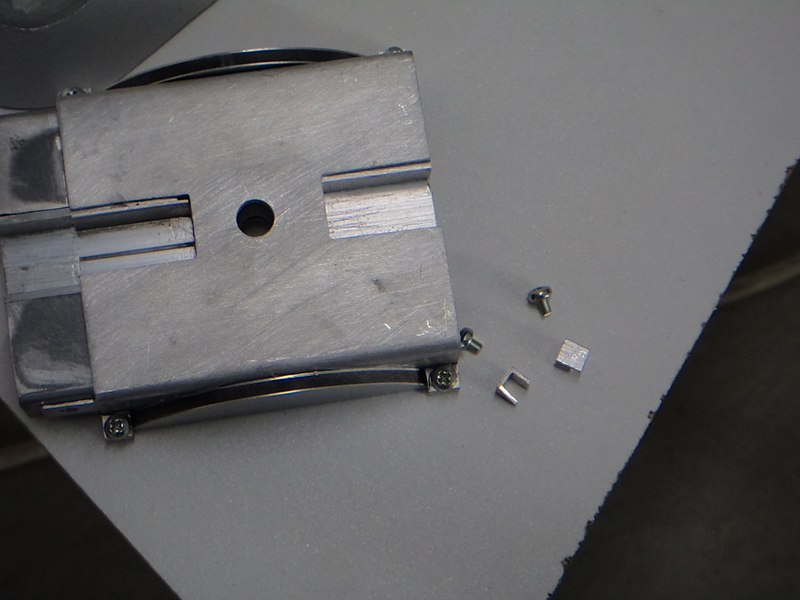
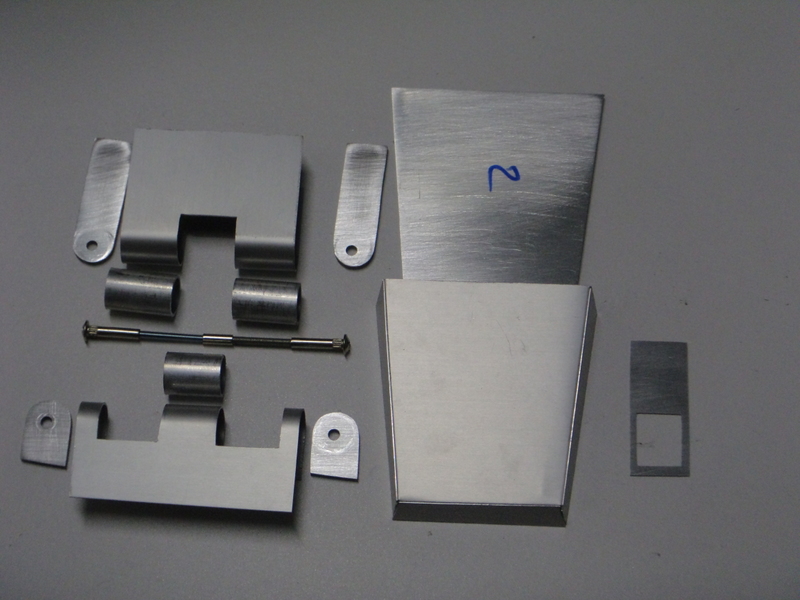
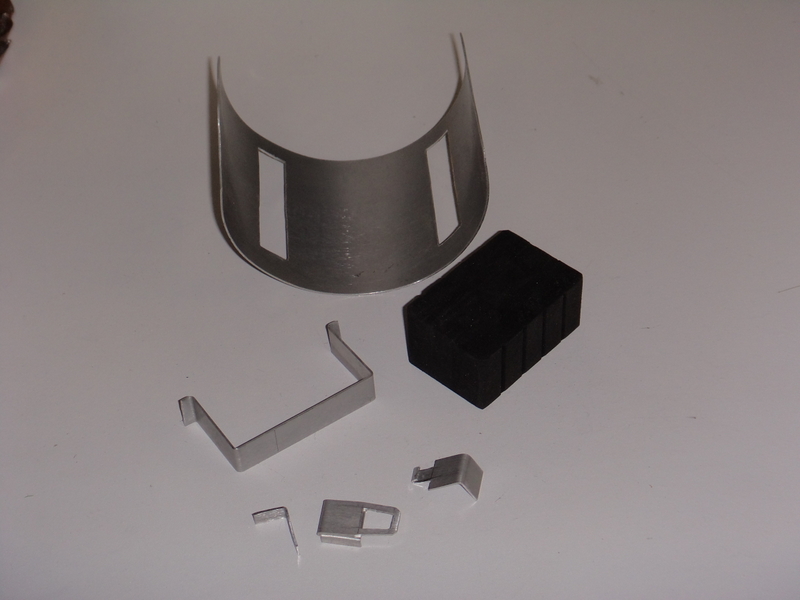
Le montage des glissières, afin d'être fidèle au modèle,
il faut un "U" en alu,
un autre "U" plus petit dans lequel va passer une tige fileté de 6 m/m qui servira à l'assemblage
un plat d'alu 2 m/m
et par dessus la pièce découpée précédemment
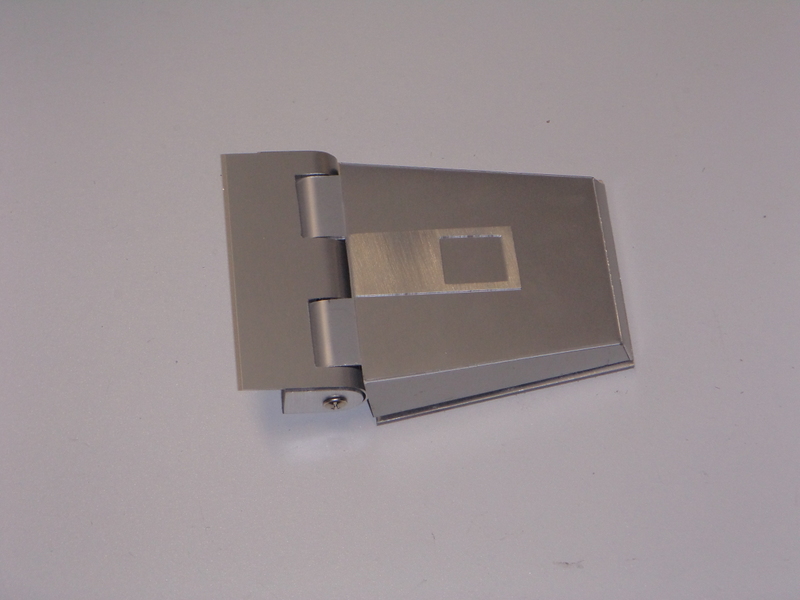
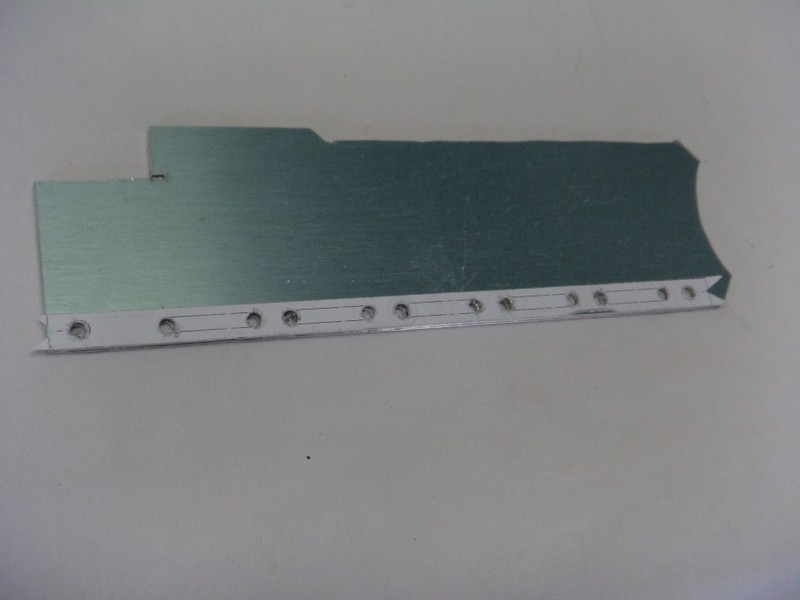
Le support une feuille d'alu, une feuille d'alucobond collé sur l'alu, le patron en papier est collé pour faire la découpe en fente, celle ci à été percée, découpé à la scie et amélioré sans papier verre mais avec une toupie.


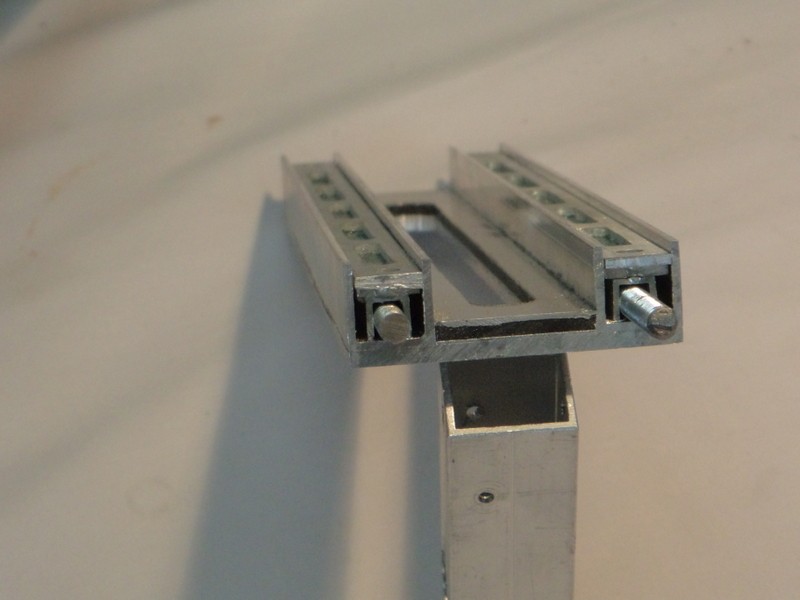
De chaque coté les U précédents sont eux aussi collés, on a ainsi une glissière complète, il faut en réaliser quatre.

Détail

Assemblage avec les tiges filetées
A chaque bout une platine alu 6 m/m découpé au bon profil.

Tout d'abord il lui faut un squelette, et en plus articulé. Toutes les parties qui peuvent être articulées le seront, et si jamais cela ne tien pas elles seront condamnées par des vis.
Mon plan de travail
Détail de la cuisse et genou
la jambe et le pied
Quelque parties qui seront imprimé sur papier autocollant, qui sera lui même collé sur l'aluminium.
Les pattes du ROBOT ou pour ceux qui préfèrent, les pieds.
Un morceau de tube diamètre 65 m/m, une rondelle en alu (fabrication maison).
L'assemblage
Découpe pour positionnement du support de doigts
MONTAGE
Phalange du doigt avant carré "plein" 15*15
Les doigts sont articulés sur les phalanges, un support permettant de les découper tous de la même façon a été fabriqué avec un morceau de bois, ce guide préserve mes doigts, car c'est sur la scie sur table que les pièces seront travaillés, un tour coute trop cher.
Une fois l'entaille terminée.
Les doigts même topo, un autre support, il suffit de retourner la pièce pour garder la zone centrale.
MONTAGE
Mise en place sur le "TALON"
Avec les trois doigts
Avec les montants support de l'articulation
L'articulation de la cheville: celle ci doit être souple, mais doit pouvoir se raidir en fonction du mouvement et surtout du poids du robot.
Deux tubes laiton ( récupération) diamètre 12 m/m
l'un est percé en son centre, diamètre 11 m/m , ensuite finition à la lime pour obtenir le diamètre 12, du coup on a deux morceaux identiques.
L'autre est percé dans son centre diamètre 8 m/m
Positionnement sur l'autre tube et serrage avec un boulon diamètre 8 m/m
Brasage de l'ensemble, la tige fileté aussi
L'ensemble est brasé, il suffit de percer la partie creuse pour enlever la tige fileté qui gène.
On obtient ainsi une croix percé dans les deux sens.
Un peut d'anatomie pour pouvoir suivre et s'y retrouver au niveau des pattes voici une planche d'anatomie avec les appellations, et les différentes articulations.
Le "TIBIA 1" tube alu équerres et autres tubes qui servent de renforts
L'ensemble monté.
Avec les doigts .............. en carton "PAPERCRAFT"
Les "DOIGTS" .......... PAPERCRAFT
De l'alu 2 m/m découpé et plié
.Tous les doigts sont fait sauf ceux de derrière. Une armature est nécessaire pour les tenir sur les phalanges, celle ci est réalisé avec des équerres en laiton soudées.
Cette pièce est la bande qui s'efface lorsque la jambe se plie et vient, toucher les doigts.
Les doigts sont tous montés, ceux de derrière aussi, conformément à mes prévisions, et contrairement aux autres réalisations trouvées sur le net, seules les 4 doigts reposent sur le sol, la paume ne repose pas par terre, ce qui devrait améliorer la tenue, si tous ce passe bien.
Sous les doigts un plaque d'alu servira à fixer la phalange.
LE TIBIA ET LES GLISSIERES
Deux feuilles d'alu 2 m/m colée entre elles avec un scotch double face, il est plus rapide de travailler deux pièces en même temps. Sauf pour des épaisseurs supérieures à 3m/m
Perçage
Découpe
Un petit coup de lime
Découpe avec la scie sur table et ponçage ( pour la photo)
Puisque la perceuse et la scie sont réglés et que le montage me convient autant en profiter pour tout découper
Le montage des glissières, afin d'être fidèle au modèle,
il faut un "U" en alu,
un autre "U" plus petit dans lequel va passer une tige fileté de 6 m/m qui servira à l'assemblage
un plat d'alu 2 m/m
et par dessus la pièce découpée précédemment
Le support une feuille d'alu, une feuille d'alucobond collé sur l'alu, le patron en papier est collé pour faire la découpe en fente, celle ci à été percée, découpé à la scie et amélioré sans papier verre mais avec une toupie.
De chaque coté les U précédents sont eux aussi collés, on a ainsi une glissière complète, il faut en réaliser quatre.
Détail
Assemblage avec les tiges filetées
A chaque bout une platine alu 6 m/m découpé au bon profil.